旋转
旋转一般分为绕坐标轴旋转和绕任意轴旋转,绕坐标轴旋转比较简单,用几个矩阵就能表示。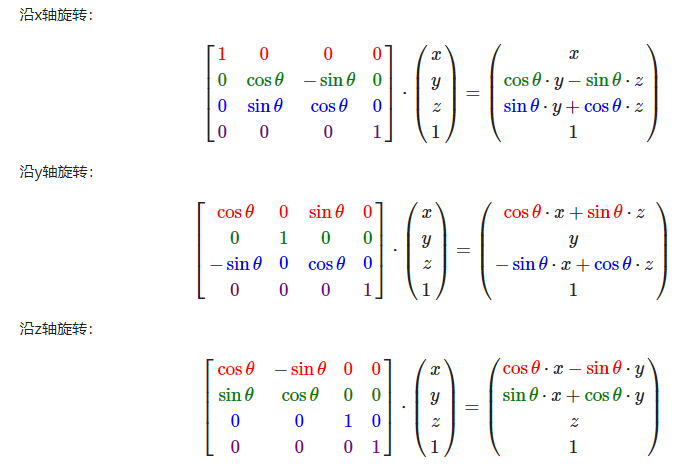
欧拉角
欧拉角分别为
- pitch 俯仰角。
- yaw 偏航角。
- roll 翻滚角。
每个角对应绕 X Y Z那个轴,不同坐标系有不同规定。
内旋和外旋
其中欧拉角又分为内旋、外旋。
- 外旋(静态欧拉角):旋转轴为世界坐标系。
- 内旋(动态欧拉角):旋转轴为物体的局部坐标系。
对于外旋,很容易知道,我们用上面几个矩阵组合即可。
对于内旋,他能转化成外旋(我不会证),也可以用上面几个矩阵组合。
欧拉角顺序
我们很容易看出,欧拉角pitch yaw roll的组合顺序不同(WIKI百科有12种组合),得到的结果也不一样,pitch yaw roll ,在定义欧拉角的时候我们需要定义旋转顺序(还有内旋外旋)
公式
例如 a b y 分别为绕 x轴,y轴,z轴旋转。
定义 旋转顺序 Z->Y->X 外旋,则
$R = X(a) * Y(b) * Z(y)$
定义 旋转顺序 X->Y->Z 内旋,则
$R = X(a) * Y(b) * Z(y)$
可以发现两个公式是一样的,事实上每种特定顺序的外旋等价于其相反顺序的内旋。